Image extraction from: Adaptive hierarchical origami-based metastructures, DOI: 10.1038/s41467-024-50497-5
Universidade Estadual da Carolina do Norte Desenvolve Robô Transformista Inspirado em Origami
Tempo de leitura: 3 minuto
Atualizado em Abr 10, 2025
-
![Kiara Fabbri]()
-
![Equipe de localização e tradução]()
Traduzido por Equipe de localização e tradução Serviços de localização e tradução

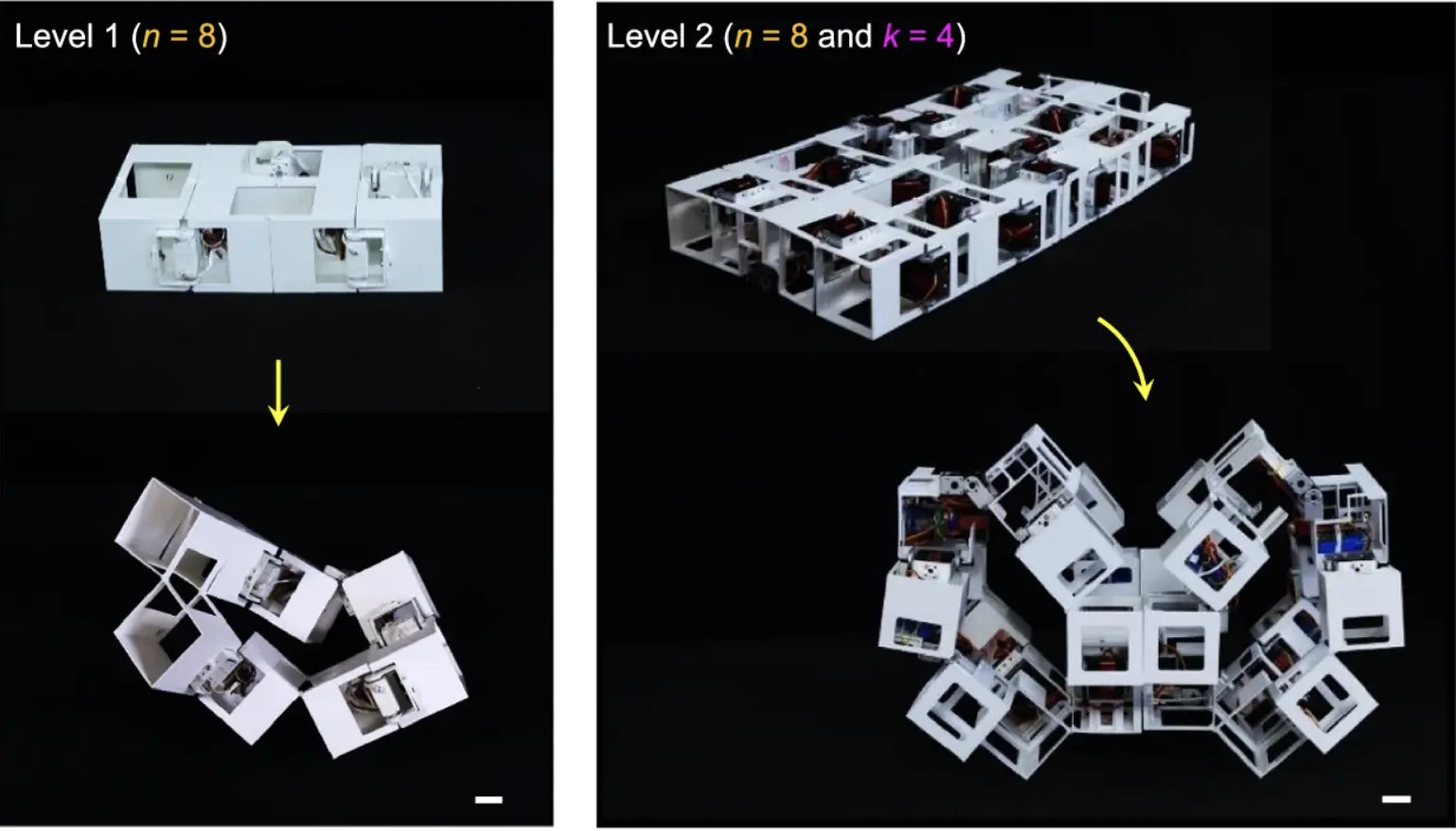
Uma equipe de pesquisadores da Universidade Estadual da Carolina do Norte criou uma estrutura de cubo de plástico capaz de se transformar em mais de 1.000 configurações usando apenas três motores. Esse avanço poderia levar ao desenvolvimento de robôs versáteis para várias aplicações, particularmente em arquitetura e exploração espacial.
Em seu artigo de pesquisa, a equipe explica como usaram uma impressora 3D para montar 36 cubos de plástico vazios conectados por dobradiças giratórias. Algumas dobradiças foram fixadas com pinos de metal, enquanto outras eram motorizadas. Essa configuração permitiu que a estrutura se transformasse em uma variedade de formas, incluindo túneis, pontes e estruturas de vários andares.
Ao mudar de forma, os robôs transformadores podem se movimentar em todas as direções e carregar cargas até três vezes o seu próprio peso, tudo isso sem a necessidade de pés.
Os robôs transformadores podem se adaptar a diferentes tarefas e ambientes, tornando-os potencialmente úteis para aplicações multifuncionais em campos como exploração espacial. A capacidade dos robôs de carregar cargas e mudar de forma conforme necessário poderia revolucionar o design de sistemas artificiais.
“Acreditamos que estes podem ser usados como robôs espaciais e habitats configuráveis e implantáveis”, afirmou Antonio Di Lallo, um dos principais autores do artigo. “É modular, então você pode enviá-lo para o espaço plano e montá-lo como um abrigo ou como um habitat, e depois desmontá-lo.”
Embora a tecnologia tenha grande promessa, existem algumas limitações. A capacidade de carga das estruturas, especialmente em escalas maiores, precisa ser melhorada. Os protótipos atuais são limitados em sua capacidade de lidar com peso significativo devido aos materiais usados nas dobradiças, que sacrificam a resistência pela flexibilidade. Além disso, os pesquisadores observaram desafios para aproveitar totalmente as capacidades de mudança de forma para diversas locomoções robóticas em ambientes não estruturados.
A pesquisa abre novos caminhos para futuras explorações. “Queremos criar uma estrutura mais robusta que possa suportar cargas maiores”, afirmou Yanbin Li, uma das autoras correspondentes do artigo, na NC State University News. “Se quisermos um formato de carro, por exemplo, como projetamos a primeira estrutura que pode se transformar em um formato de carro? Também queremos testar nossas estruturas com aplicações reais, como robôs espaciais.”
O estudo, publicado na Nature Communications, foi apoiado por bolsas da National Science Foundation. Essa abordagem inovadora para o design de robôs poderia abrir o caminho para novos avanços em sistemas artificiais, tornando-os mais adaptáveis e funcionais para diversas aplicações.

 Artigos mais recentes
Artigos mais recentes 


Deixe um comentário
Cancelar